シミュレーションからの汎化
Generalizing from simulation
記事のポイント
📰ニュース
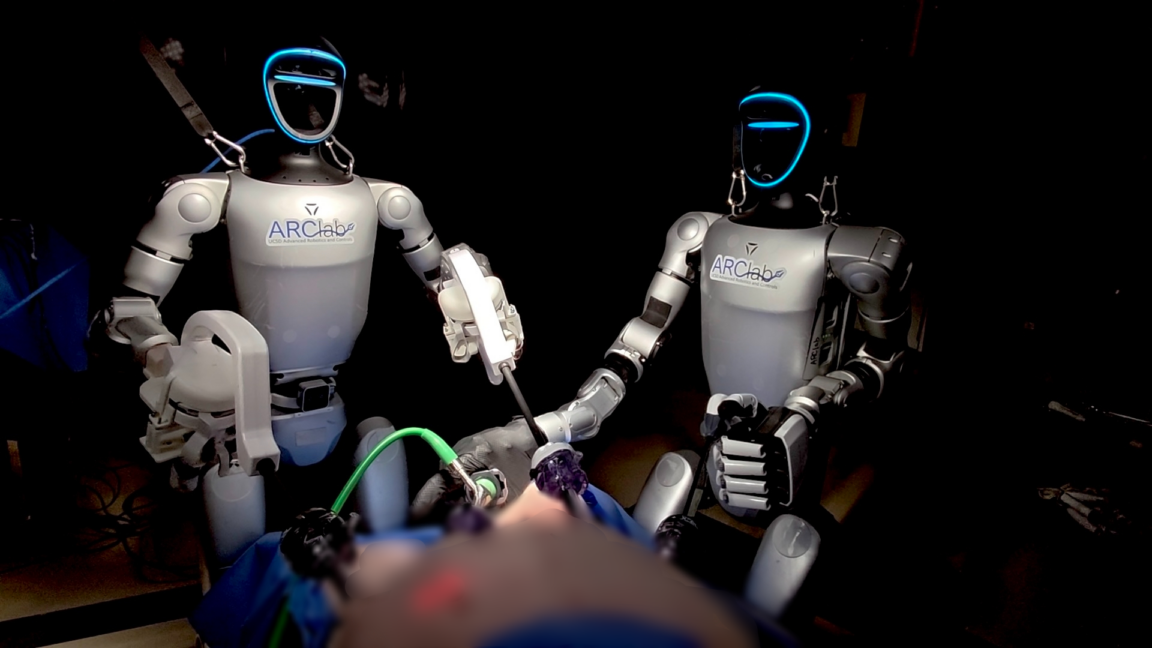
OpenAIがシミュレーションで訓練したロボットが、実環境の予期せぬ変化に対応できるようになった。
🔍注目ポイント
閉ループシステムを構築し、シミュレーションで学習した制御器が実環境で汎用的に機能する。
🔮これからどうなる
ロボットがより複雑で動的なタスクを自律的に実行できるようになり、実用性が向上する。
これまでのオープンループシステムとは異なり、ロボットが環境の変化に反応して動作を調整できるようになった。
これにより、シミュレーションで訓練した制御器を物理ロボットにそのまま展開し、簡単なタスクを解決する際に予期せぬ変化に対応できるようになった。
これにより、シミュレーションで訓練した制御器を物理ロボットにそのまま展開し、簡単なタスクを解決する際に予期せぬ変化に対応できるようになった。

シミュレーションで学習したロボットが実環境でちゃんと動くってすごいよね!これでロボット開発がもっと加速しそう!