
Nvidia、人間型AIロボットの人間との安全性を向上させる取り組み
Nvidiaが人間型AIロボットが人間と安全に協働するための技術開発を進めています。
Nvidiaが人間型AIロボットが人間と安全に協働するための技術開発を進めています。
GMO AI&ロボティクス商事が中国Unitree Roboticsの日本国内正規代理店になりました。

NVIDIAがAIエージェントでロボットを自律改善するフレームワーク「ENPIRE」を発表しました。
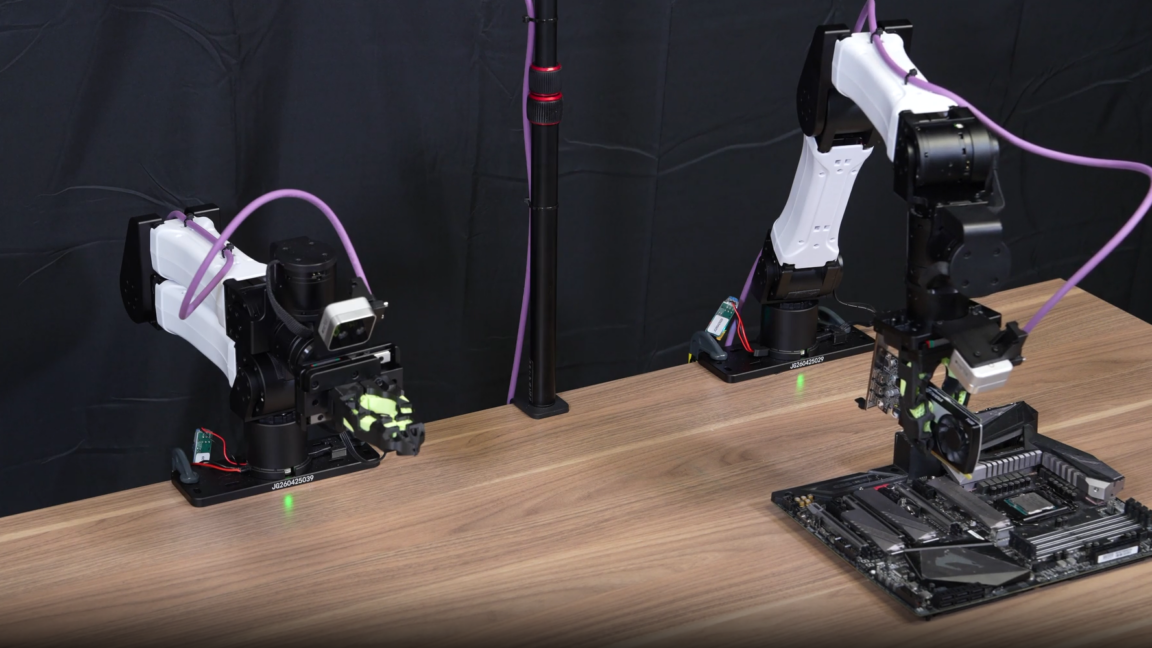
NVIDIAのAIコーディングエージェントが、ロボットにGPUの設置と結束バンドの切断方法を教えました。

中国・深圳のIO-AI Tech社で、VR機器を使って人型ロボットを遠隔操作する仕事が注目されています。

ロボットAIの訓練データ収集という地味で大変な作業を、一部のAIラボがXDOFに委託しています。

Nvidiaの研究チームがAIコーディングエージェントを用いて、ロボットが器用な把持タスクを自己学習する技…

Hugging Faceがロボット制御フレームワーク「LeRobot」とエージェントフレームワーク「Strands Agents」を…

フランスのスタートアップGenesis AIが、人間型ではない新しいロボット「Eno」を発表しました。
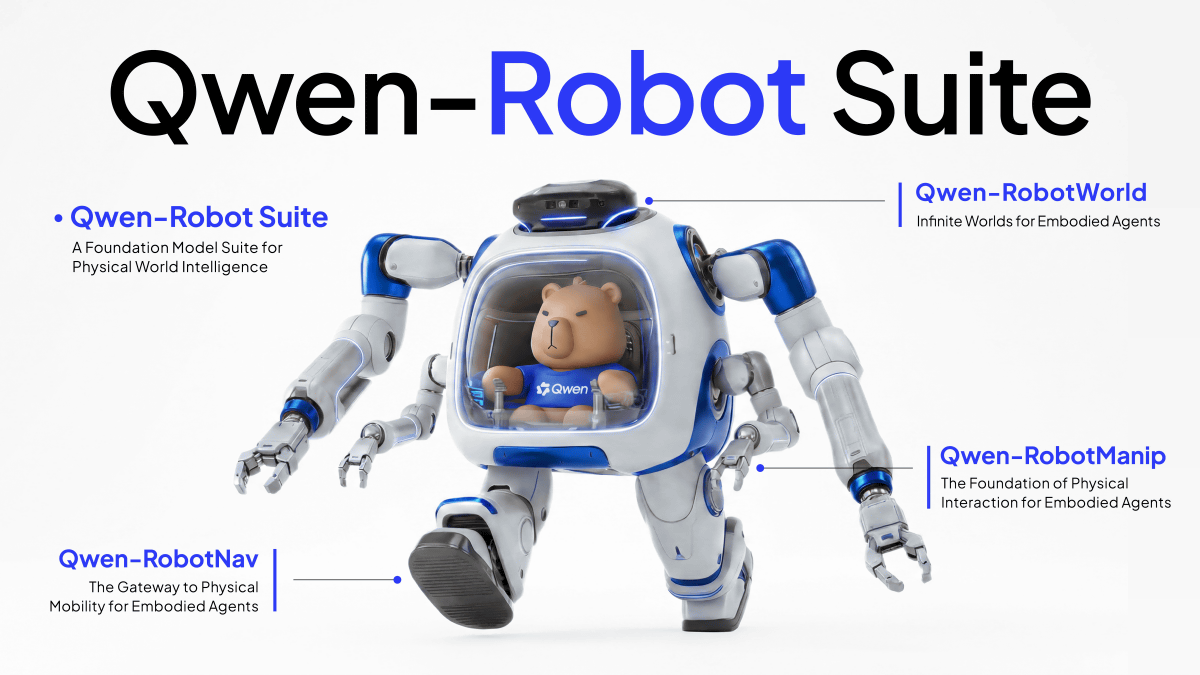
Alibabaがロボットの自動操作を可能にするAIモデル群「Qwen-Robot Suite」を発表しました。

元Google CEOが支援するスタートアップが、LGと共同でAI搭載の産業用ロボットを発表しました。

ugoがデータセンターの見回り業務を自動化する小型点検ロボット「ugo mini」を発表しました。