
アカツキAIテクノロジーズ、「フィジカルAIソリューション」提供開始 企業のロボット導入を構想から実装、運用まで支援
アカツキAIテクノロジーズが企業のロボット導入を支援する「フィジカルAIソリューション」の提供を開始し…
アカツキAIテクノロジーズが企業のロボット導入を支援する「フィジカルAIソリューション」の提供を開始し…

視覚言語モデル(VLM)を活用し、ロボットが人間の感情を顔の表情だけでなく文脈も考慮して認識する研究が…
ジェフ・ベゾス氏が物理AI分野の新スタートアップ「プロメテウス」を設立しました。
韓国のロボットスタートアップRLRWLDが、Nvidiaと提携し、ロボットの器用さを評価する普遍的なベンチマー…
中国のロボット企業Unitree Roboticsが、人型ロボットの普及戦略と日本市場開拓について語りました。

中国のヒューマノイドロボットメーカーEngineAIが香港での新規株式公開(IPO)を秘密裏に申請した模様です…

Thekerが8500万ドルを調達し、特定の作業に特化しない再構成可能な工場ロボットを開発します。
中国が人型ロボット開発競争で先行しており、日本が第三極を目指す戦略が議論されました。

日本のロボットソフトウェア開発企業Mujinが、2030年までの株式公開を目指し資金調達を進めています。

ロボタクシー業界がプロトタイプ段階から商用運用へと移行し、安全性の確保が喫緊の課題となっています。
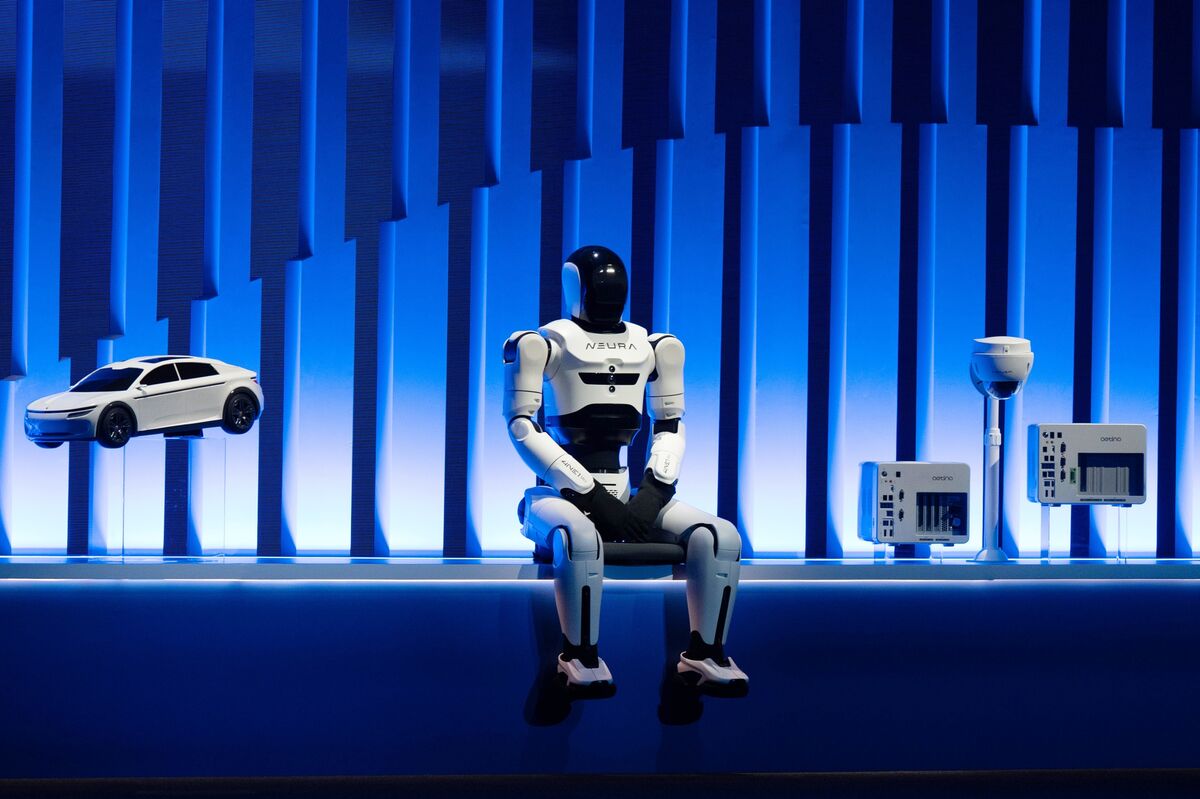
ドイツのロボットスタートアップNeuraが、ステーブルコイン発行会社テザーから14億ドルの資金調達を実施し…

インドのロボットスタートアップAddverb Technologiesが、1億ドル以上の資金調達を目指しています。