
ヨーロッパにおけるロボティクスの未来を推進
Google DeepMindがヨーロッパのロボット研究を支援する新たな取り組みを発表しました。
Google DeepMindがヨーロッパのロボット研究を支援する新たな取り組みを発表しました。

Kindred Venturesがディープテックとロボティクス向けに3億5500万ドルの新たなファンドを調達しました。
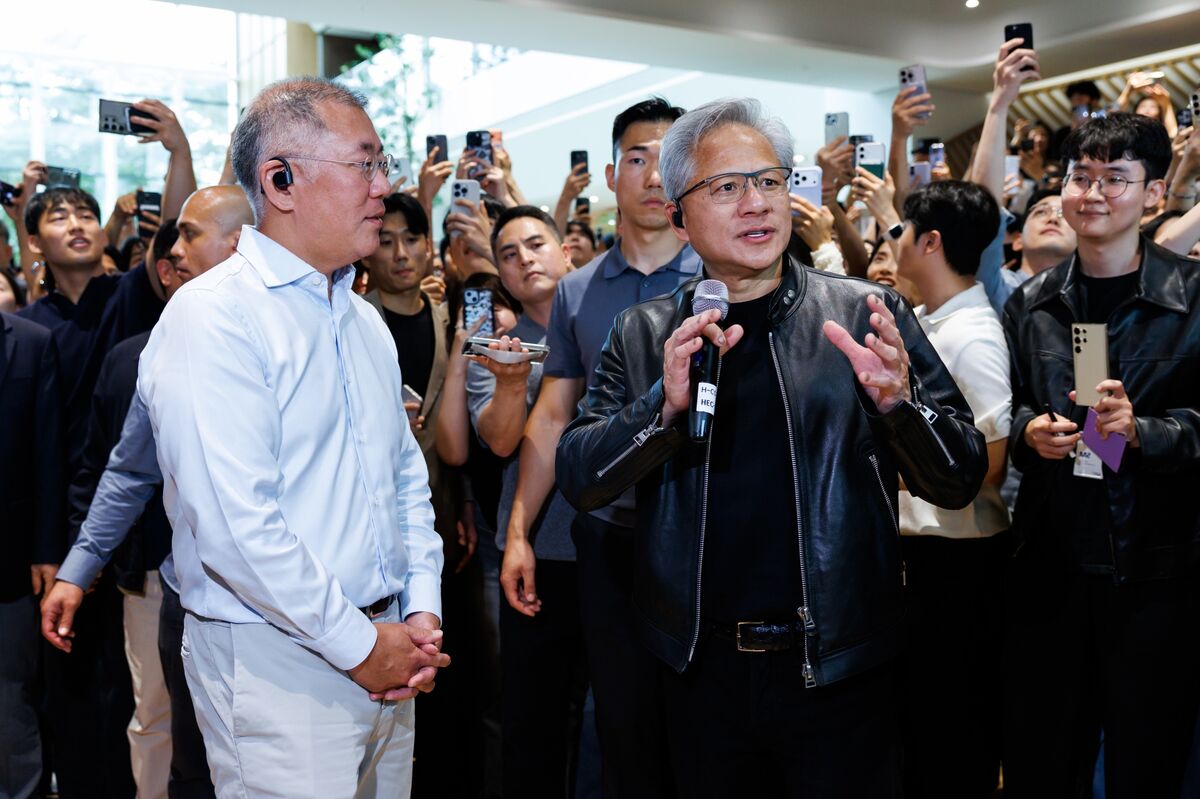
Nvidiaと現代自動車グループが、AIとロボット技術の産業応用を加速するため提携を強化しました。

カシオ計算機がAIペットロボット「モフリン」を好調な新規事業として育成しています。

NVIDIAと斗山グループが物理AI、ロボティクス、AIファクトリーインフラ分野での協業を拡大しました。

Web Summit Vancouver 2026でフィジカルAI関連のスタートアップが注目を集めました。

インターネット上で拡散するヒューマノイドロボットのデモンストレーション動画が、ロボットの実際の能力…

Hello Robotが家庭用アシスタントロボット「Stretch」の第4世代をリリースしました。
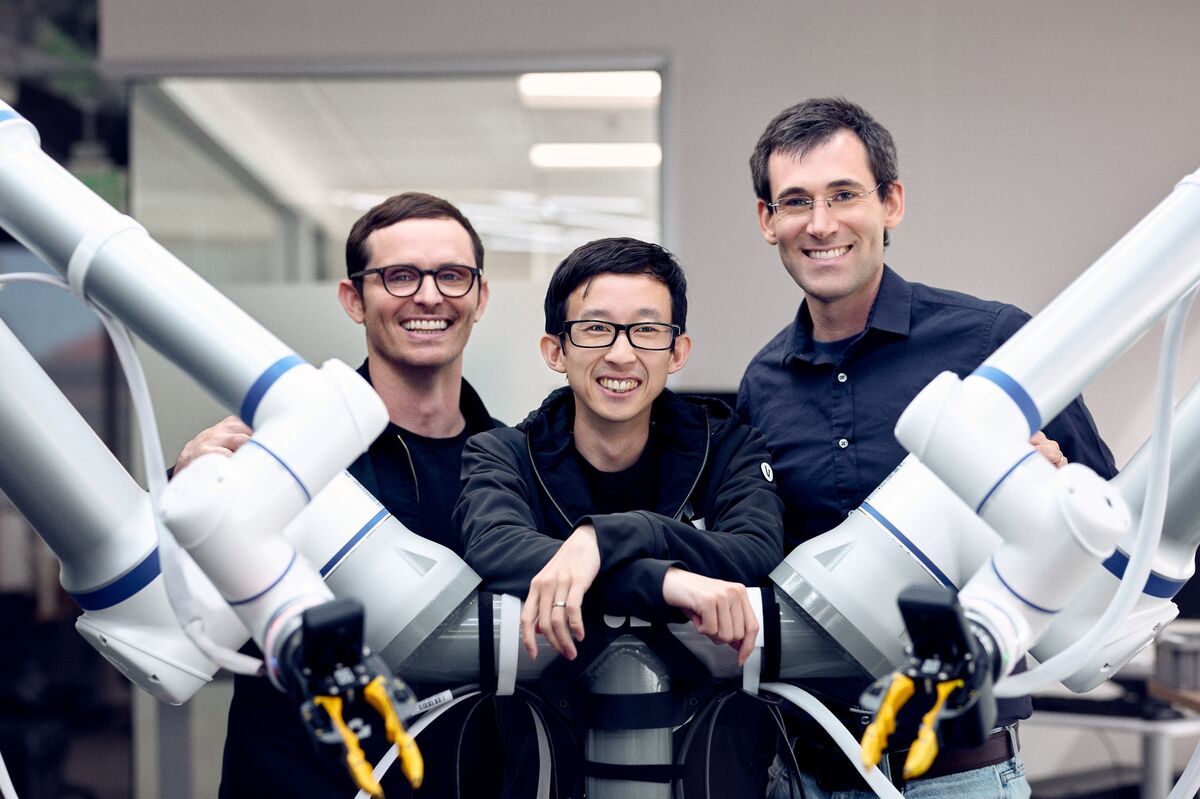
Nvidiaが支援するロボティクススタートアップGeneralist AIが、評価額20億ドルで4億ドルの資金調達を実施…

Amazonが、人間と自然言語で対話可能な自律型倉庫ロボット「Proteus」の新バージョンを発表しました。

Nvidiaが中国製ボディとアメリカ製AIを組み合わせた新しいヒューマノイドロボットを発表しました。
人型ロボットの先駆者であるホンダが、現在のロボットブームと今後の戦略について見解を表明しました。